Robotics-Projekt der 8a
Am 16. April 2015 besuchte die Klasse 8a die Technische Hochschule in Nürnberg. Nach einer allgemeinen Einführung über die Geschichte der Universität und die vielen Fächer, die man dort studieren konnte, stiegen wir 6 Stockwerke hoch in eine Werkstatt.
Hier erklärte uns Professor May, ein Freund von Herrn Koch, was man beim Bau und der Planung von Robotern berücksichtigen muss.
Rettungsroboter sollen selbständig in Räume fahren, sich umschauen und herausfinden, ob dort noch Personen sind. Feuerwehrleute können dann anschließend direkt zu den Opfern gehen und ihren Aufenthalt so kurz wie möglich halten.



Die Roboter müssen sich zuerst orientieren. Dies geht so, dass sie in einem Raum die Entfernung zu allen Hindernissen messen und dann nach vorne fahren und die Messung wiederholen. Indem immer mehr Punkte zusammen kommen, wird eine Landkarte dieses Raums erstellt. Durch Infrarotsensoren oder Ablesen von RFID-Chips können Menschen oder bestimmte Maschinen identifiziert werden.
Zum Schulfest am 15.05.20015 wollten wir selbst aktiv werden.
Da einige Schüler schon Lego-Mindstorms-Roboter haben, haben wir einen Hindernis-Parcours aufgebaut, auf dem Roboter selbständig zu ihrem Ziel fahren mussten. Dabei sollen sie Hindernisse erkennen und ausweichen.
Das alles kann man den Robotern „beibringen“. Herzstück des aus Lego-Teilen zusammengebauten Roboters ist der „brick“ ((Ziegel-)Block), in dem sich ein kleiner Computer befindet. Er kann mit der kostenlosen Lego-Software an jedem PC ganz leicht programmiert weden. Mittels Kabel, USB-Stick oder Bluetooth werden die Programme dann übertragen und ausprobiert.

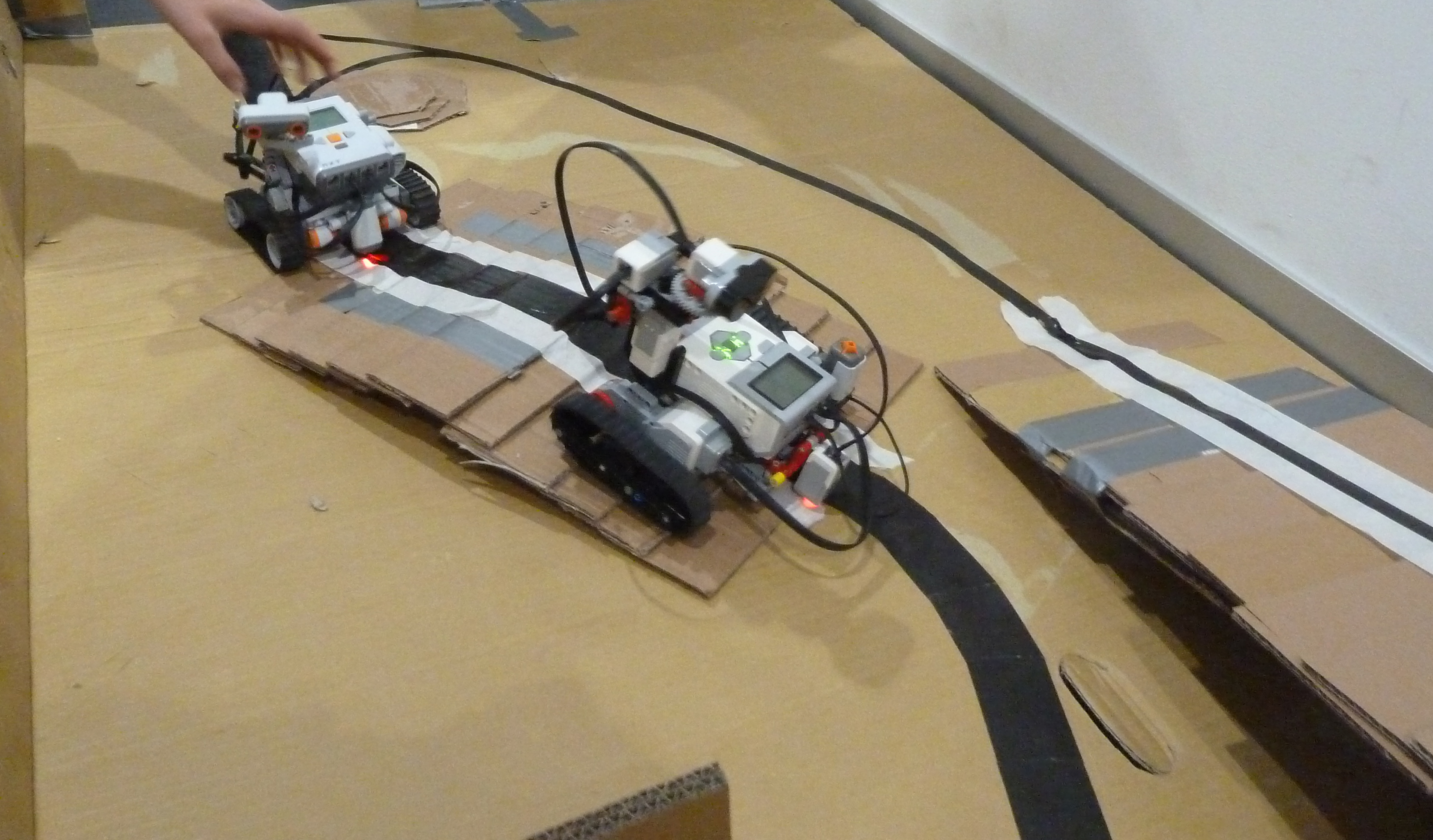
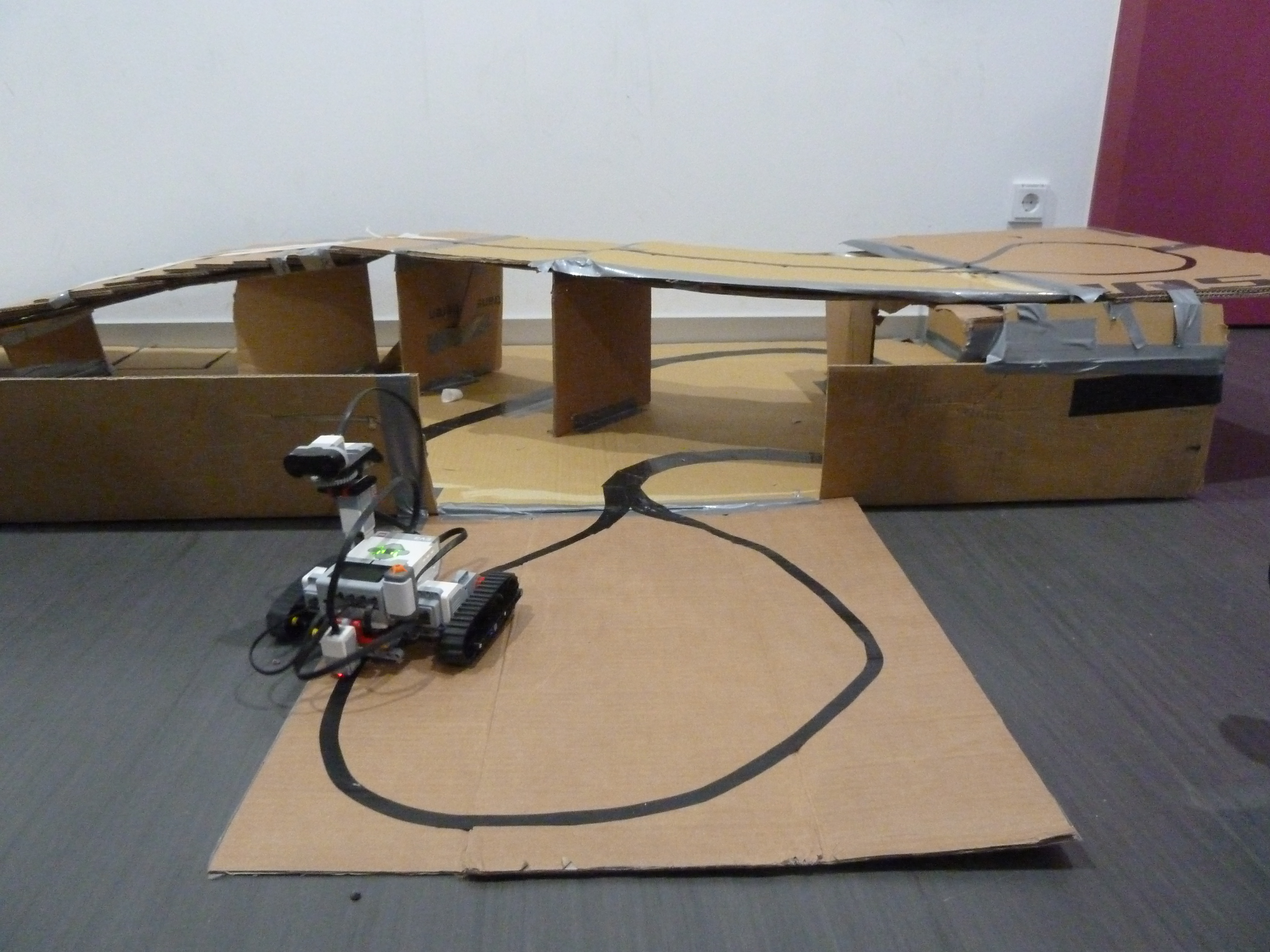

Der Line-Follower tastet mit einem Farb-Sensor den Boden ab. Dabei folgt er der schwarzen Linie, indem er immer wenn er weiß „sieht“, wieder zur schwarzen Linie zurücklenkt. Am roten Zielpunkt erkennt er, dass die Strecke zu Ende ist und wendet.
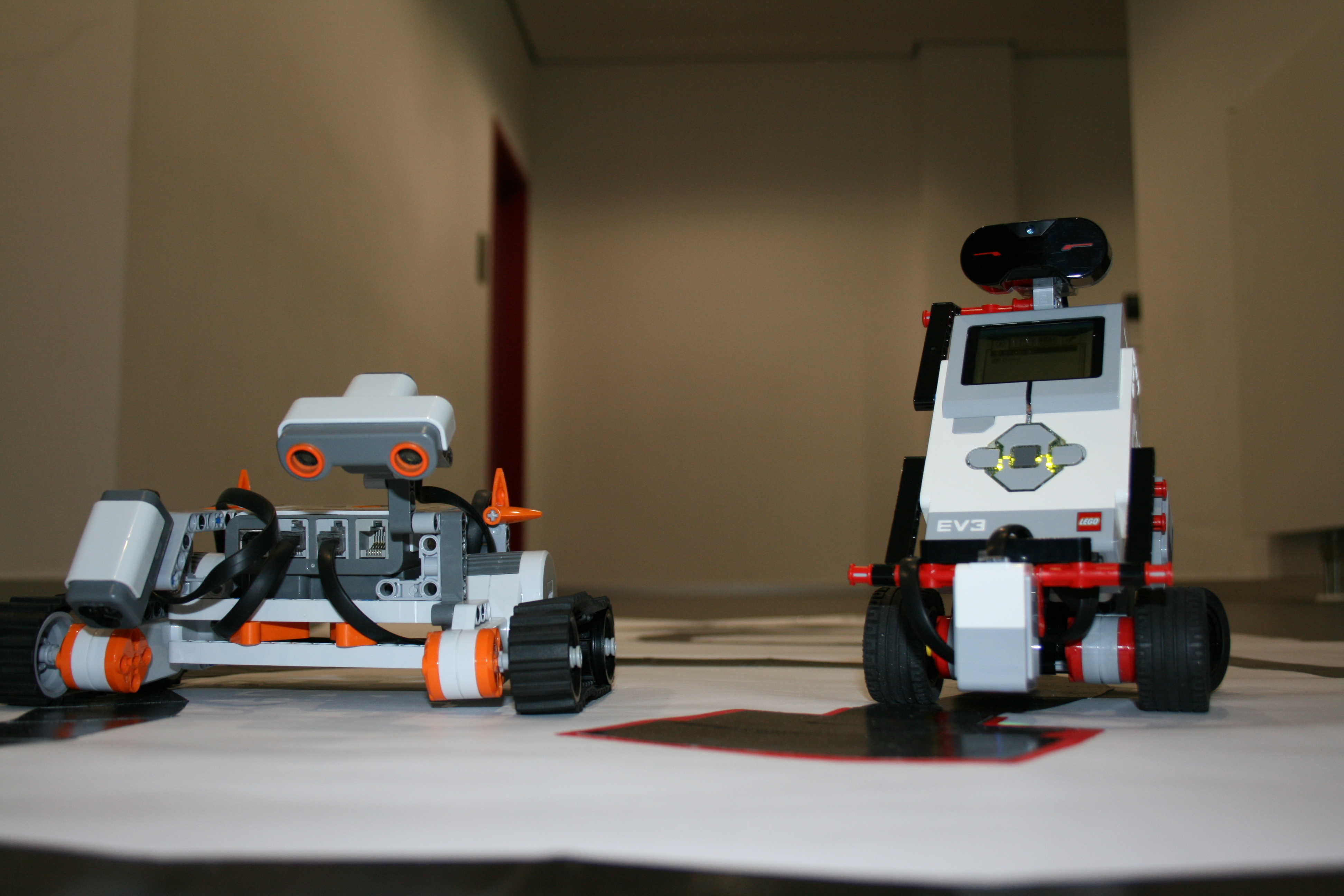
Der Lego NXT 2.0 und sein Nachfolger, der EV3.
Parallel dazu sammelten wir erste Erfahrungen mit dem TXT-Roboter von Fischertechnik.
Der Wall-Follower fährt ohne Lenkung oder Fernsteuerung frei durch ein Labyrinth. Trifft er auf ein Hindernis, biegt er ab und folgt der Wand.
Marko Gale, 8a